Yulin Li
Postdoctoral Fellow, NUS

I am currently a Postdoctoral Fellow at the National University of Singapore NUS, working with Prof. Fan Shi.
I received my Ph.D. degree in Robotics and Autonomous Systems from the Hong Kong University of Science and Technology (HKUST), where I was jointly supervised by Prof. Jun Ma and Prof. Michael Yu Wang. Prior to my doctoral studies, I earned the M.Sc. degree in Mechanical and Aerospace Engineering from the University of California, San Diego (UCSD) with a major in robot control and motion planning, and the B.Eng. degree in Mechatronic Engineering from Tongji University.
My research is driven by a long-term goal of enabling robots to interact with the physical world in a safe, capable, and intelligent manner — knowing when to avoid contact and when to exploit it. Over the past years, I have built up expertise in generating motion policies for mobile manipulators in complex scenarios, combining optimization-based planning with learning-based methods, with an emphasis on safe and adaptive behavior grounded in physical models and principled reasoning — from collision-free navigation in cluttered environments to contact reasoning during interaction. In my current postdoctoral research, I am pursuing a more general foundation for both: physics-driven world models that combine differentiable high-fidelity physics simulators with learnable components, yielding models that are physically consistent, end-to-end differentiable, and broadly applicable across the full spectrum of robot–environment interaction.
During my Ph.D. studies, I collaborated with Prof. Xindong Tang on the theory and application of Moment and Polynomial Optimization. I also visited the Computational Robotics Lab at Harvard University, where I worked with Prof. Heng Yang on high-performance numerical solvers for Contact-Implicit Motion Planning.
Selected Publications
Please see my Google Scholar for a full list of publications.
-
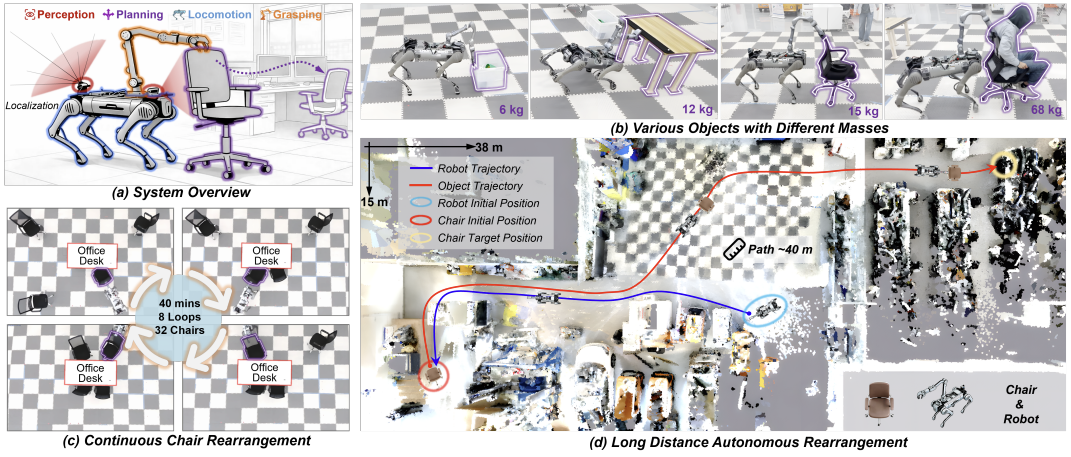 ALORE: Autonomous Large-Object Rearrangement with a Legged ManipulatorarXiv preprint, 2026interactive navigation contact-rich manipulation loco-manipulation legged manipulator
ALORE: Autonomous Large-Object Rearrangement with a Legged ManipulatorarXiv preprint, 2026interactive navigation contact-rich manipulation loco-manipulation legged manipulator -
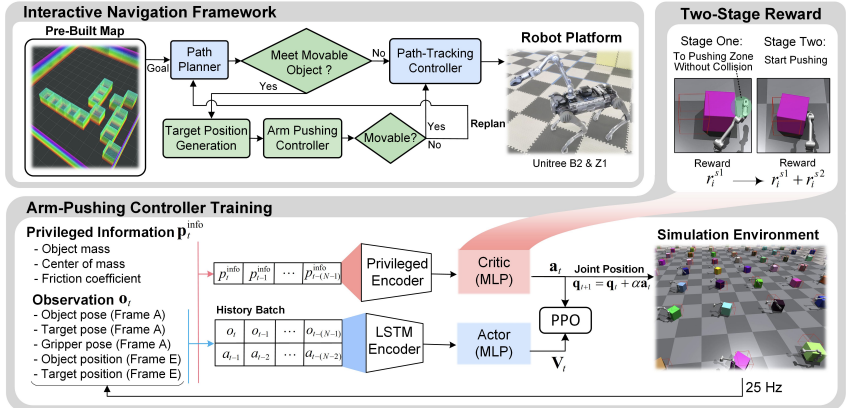 Interactive Navigation for Legged Manipulators with Learned Arm-Pushing ControllerIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Best Paper Finalist, 2025interactive navigation contact-rich manipulation loco-manipulation legged manipulator
Interactive Navigation for Legged Manipulators with Learned Arm-Pushing ControllerIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Best Paper Finalist, 2025interactive navigation contact-rich manipulation loco-manipulation legged manipulator -
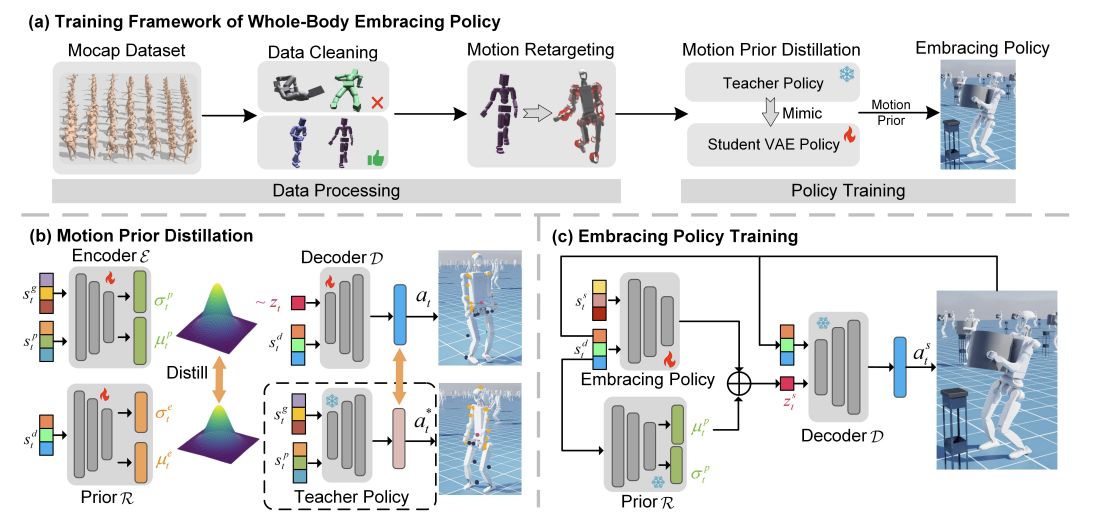 Embracing Bulky Objects with Humanoid Robots: Whole-Body Manipulation with Reinforcement LearningInternational Conference on Robotics & Automation (ICRA), 2026humanoid contact-rich manipulation loco-manipulation reinforcement learning
Embracing Bulky Objects with Humanoid Robots: Whole-Body Manipulation with Reinforcement LearningInternational Conference on Robotics & Automation (ICRA), 2026humanoid contact-rich manipulation loco-manipulation reinforcement learning -
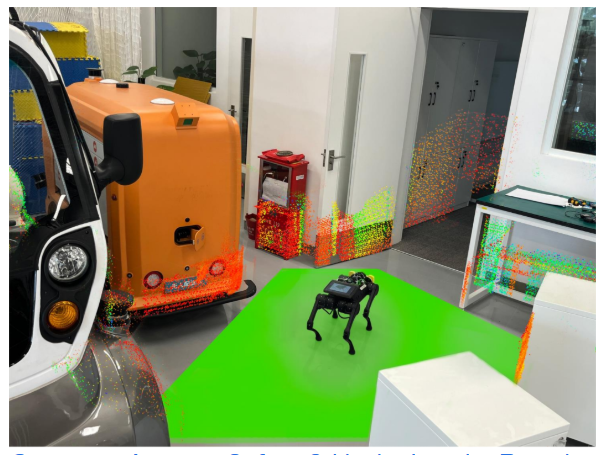 Geometry-Aware Safety-Critical Local Reactive Controller for Robot Navigation in Unknown and Cluttered EnvironmentsIEEE Robotics and Automation Letters (RA-L), 2024reactive control collision avoidance
Geometry-Aware Safety-Critical Local Reactive Controller for Robot Navigation in Unknown and Cluttered EnvironmentsIEEE Robotics and Automation Letters (RA-L), 2024reactive control collision avoidance -
 Collision-Free Trajectory Optimization in Cluttered Environments Using Sums-of-Squares ProgrammingIEEE Robotics and Automation Letters (RA-L), 2024collision avoidance trajectory optimization
Collision-Free Trajectory Optimization in Cluttered Environments Using Sums-of-Squares ProgrammingIEEE Robotics and Automation Letters (RA-L), 2024collision avoidance trajectory optimization -
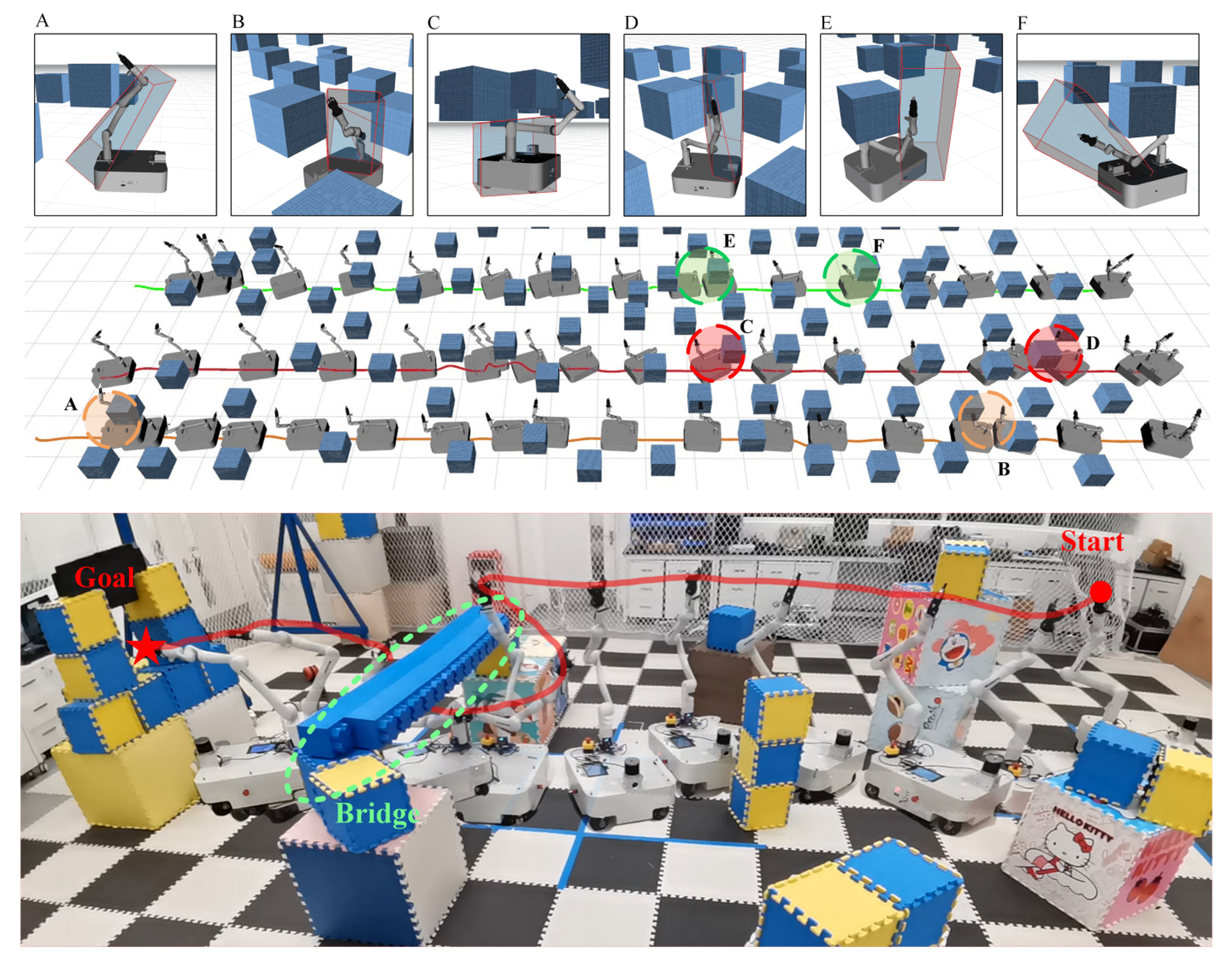 Local Reactive Control for Mobile Manipulators with Whole-Body Safety in Complex EnvironmentsIEEE Robotics and Automation Letters (RA-L), 2025mobile manipulator reactive control collision avoidance
Local Reactive Control for Mobile Manipulators with Whole-Body Safety in Complex EnvironmentsIEEE Robotics and Automation Letters (RA-L), 2025mobile manipulator reactive control collision avoidance -
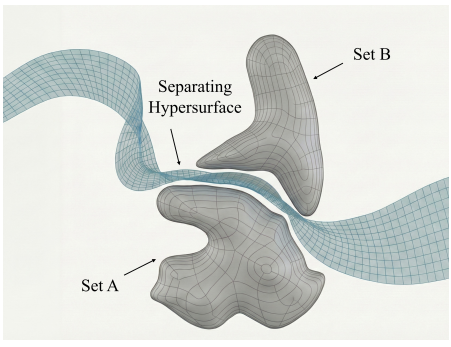 Online Trajectory Optimization for Arbitrary-Shaped Mobile Robots via Polynomial Separating HypersurfacesIEEE Robotics and Automation Letters (RA-L), 2026collision avoidance trajectory optimization
Online Trajectory Optimization for Arbitrary-Shaped Mobile Robots via Polynomial Separating HypersurfacesIEEE Robotics and Automation Letters (RA-L), 2026collision avoidance trajectory optimization -
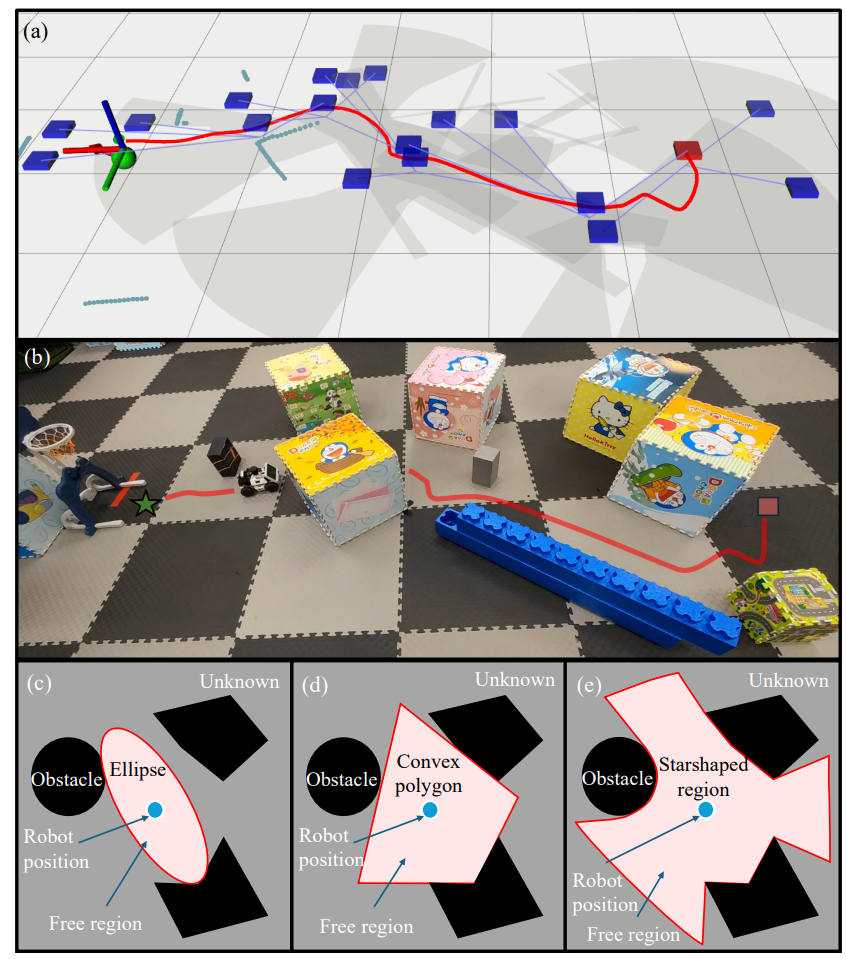 Robot Navigation in Unknown and Cluttered Workspace with Dynamical System Modulation in Starshaped RoadmapIEEE International Conference on Robotics and Automation (ICRA), 2025navigation collision avoidance dynamical system modulation
Robot Navigation in Unknown and Cluttered Workspace with Dynamical System Modulation in Starshaped RoadmapIEEE International Conference on Robotics and Automation (ICRA), 2025navigation collision avoidance dynamical system modulation -
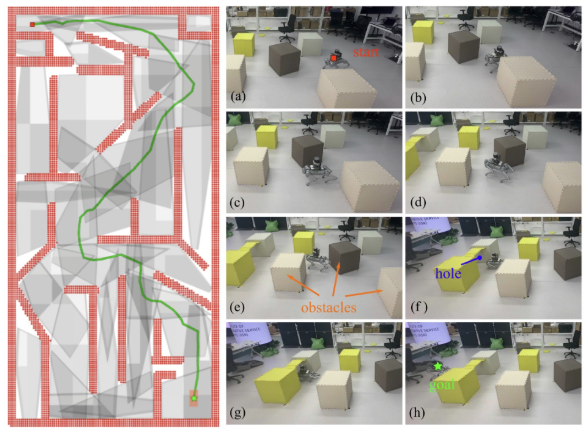
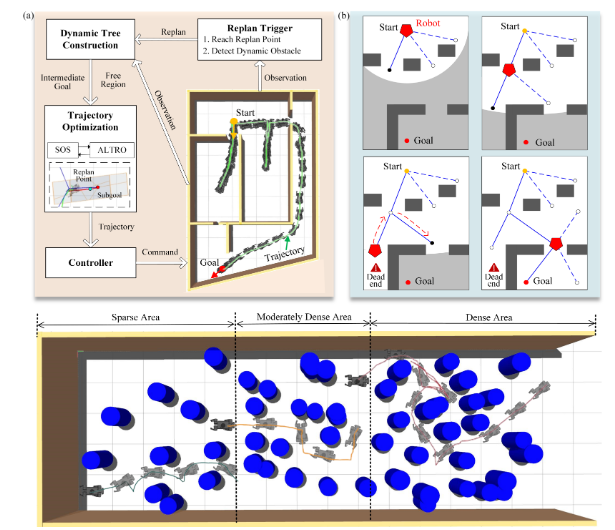 FRTree Planner: Robot Navigation in Cluttered and Unknown Environments with Tree of Free RegionsIEEE Robotics and Automation Letters (RA-L), 2025navigation collision avoidance
FRTree Planner: Robot Navigation in Cluttered and Unknown Environments with Tree of Free RegionsIEEE Robotics and Automation Letters (RA-L), 2025navigation collision avoidance -
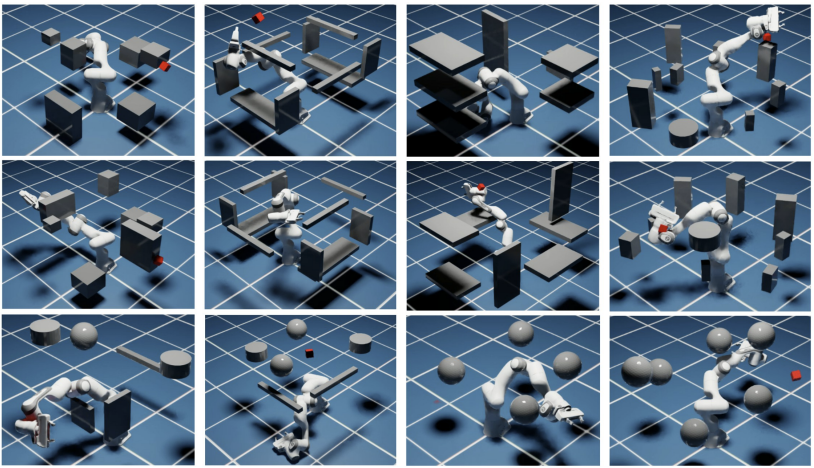 SAMP: Spatial Anchor-based Motion Policy for Collision-Aware Robotic ManipulatorsarXiv preprint, 2025manipulation collision avoidance
SAMP: Spatial Anchor-based Motion Policy for Collision-Aware Robotic ManipulatorsarXiv preprint, 2025manipulation collision avoidance -
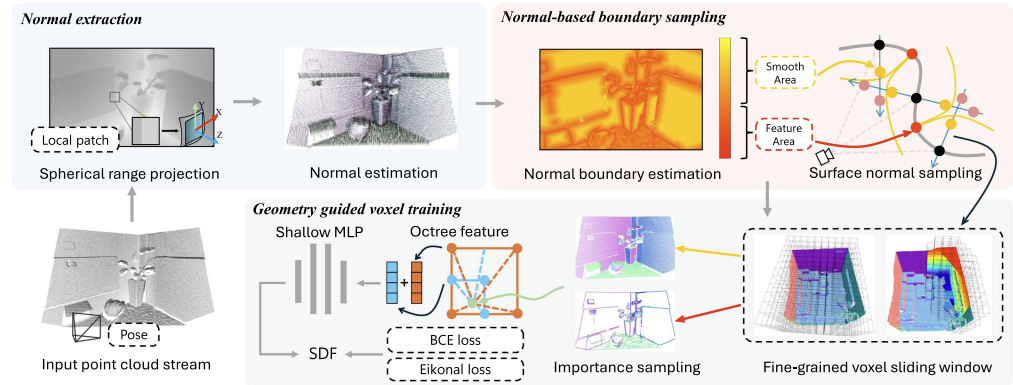 G2-SDF: Geometry-Guided Neural Signed Distance Fields for Scalable and Detailed ReconstructionIEEE Robotics and Automation Letters (RA-L), 2025neural distance field scene reconstruction
G2-SDF: Geometry-Guided Neural Signed Distance Fields for Scalable and Detailed ReconstructionIEEE Robotics and Automation Letters (RA-L), 2025neural distance field scene reconstruction















