Yulin Li
Ph.D. Candidate, Robotics and Autonomous Systems, HKUST

I am currently a fourth-year Ph.D. candidate in Robotics and Autonomous Systems at the Hong Kong University of Science and Technology (HKUST), where I am jointly supervised by Prof. Jun Ma and Prof. Michael Yu Wang. Prior to my time at HKUST, I earned the M.Sc. degree in Mechanical and Aerospace Engineering from the University of California, San Diego (UCSD), and my B.Eng. degree in Mechatronic Engineering from Tongji University.
My research interests lie at the intersection of Optimization and Robot Motion Planning, particularly in designing algorithms that enable robots to intelligently interact with their surroundings. I focus on creating solutions that achieve safe and agile motion in complex environments while delivering both high practical performance and rigorous theoretical guarantees.
During my Ph.D. studies, I have collaborated with Prof. Xindong Tang on the theory and application of Moment and Polynomial Optimization. I also had the opportunity to visit the Computational Robotics Lab at Harvard University, where I worked with Prof. Heng Yang to develop high-performance numerical solvers for Contact-Implicit Motion Planning.
Selected Publications
Please see my Google Scholar for a full list of publications.
-
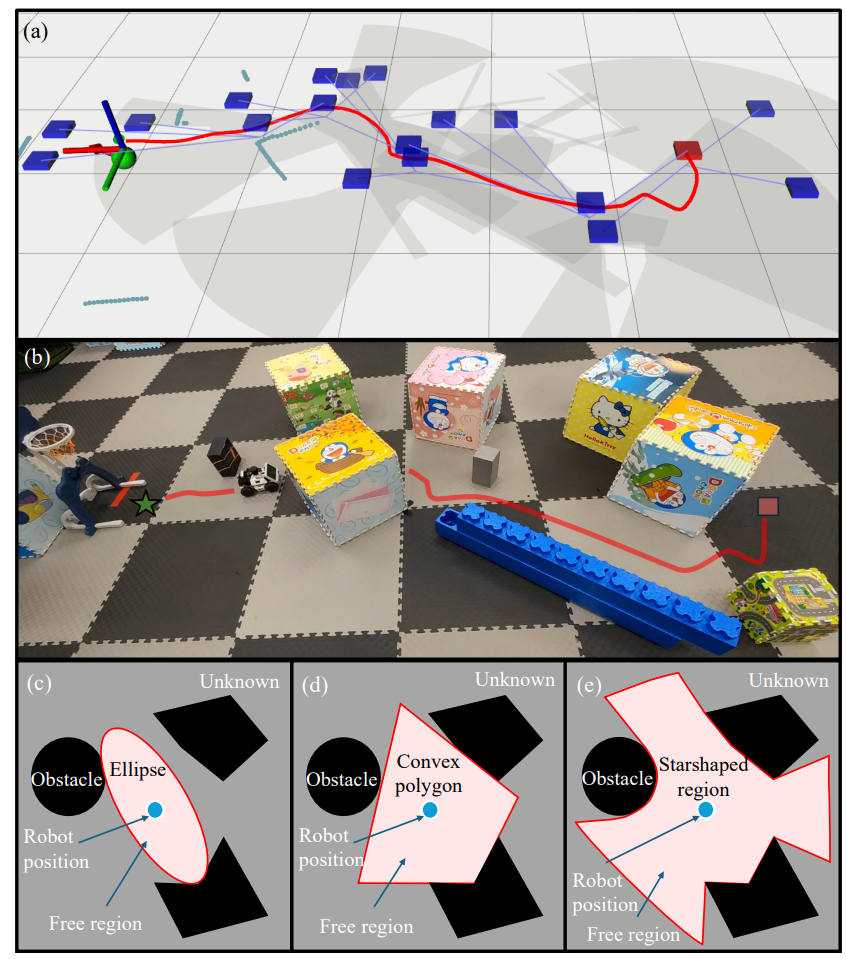
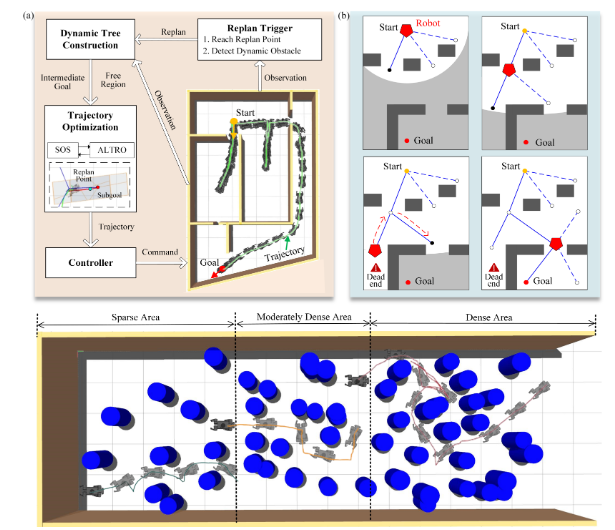 FRTree Planner: Robot Navigation in Cluttered and Unknown Environments with Tree of Free RegionsIEEE Robotics and Automation Letters (RA-L), 2025
FRTree Planner: Robot Navigation in Cluttered and Unknown Environments with Tree of Free RegionsIEEE Robotics and Automation Letters (RA-L), 2025 -
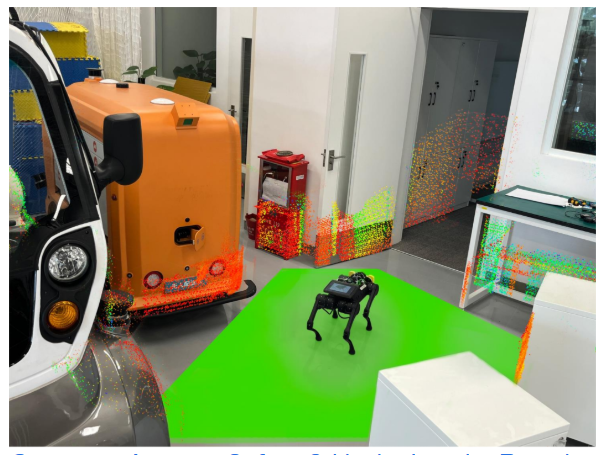 Geometry-Aware Safety-Critical Local Reactive Controller for Robot Navigation in Unknown and Cluttered EnvironmentsIEEE Robotics and Automation Letters (RA-L), 2024
Geometry-Aware Safety-Critical Local Reactive Controller for Robot Navigation in Unknown and Cluttered EnvironmentsIEEE Robotics and Automation Letters (RA-L), 2024 -
 Collision-Free Trajectory Optimization in Cluttered Environments Using Sums-of-Squares ProgrammingIEEE Robotics and Automation Letters (RA-L), 2024
Collision-Free Trajectory Optimization in Cluttered Environments Using Sums-of-Squares ProgrammingIEEE Robotics and Automation Letters (RA-L), 2024 -
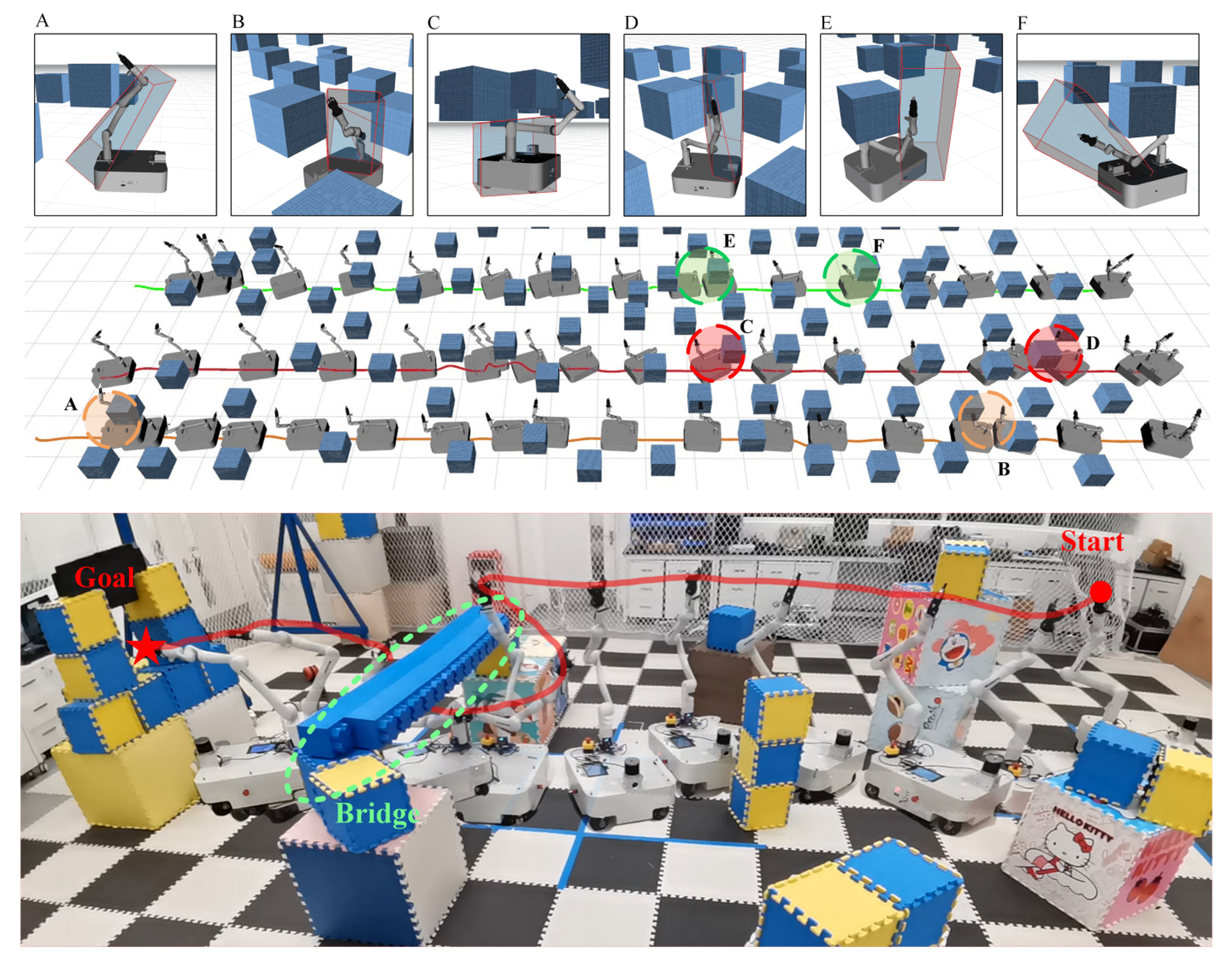 Local Reactive Control for Mobile Manipulators with Whole-Body Safety in Complex EnvironmentsIEEE Robotics and Automation Letters (RA-L), 2025
Local Reactive Control for Mobile Manipulators with Whole-Body Safety in Complex EnvironmentsIEEE Robotics and Automation Letters (RA-L), 2025 -
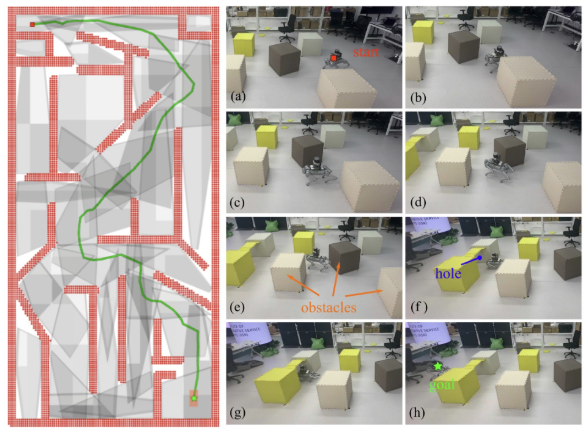
 Robot Navigation in Unknown and Cluttered Workspace with Dynamical System Modulation in Starshaped RoadmapIEEE International Conference on Robotics and Automation (ICRA), 2025
Robot Navigation in Unknown and Cluttered Workspace with Dynamical System Modulation in Starshaped RoadmapIEEE International Conference on Robotics and Automation (ICRA), 2025





